

product category
Product Details
Athena Autonomous Driving Software System
Athena (Athena) autonomous driving software system
Athena (Athena) is an open, lightweight, flexible and highly reliable automatic driving software platform launched by Universal Smart, serving the application development of OEM and autonomous driving companies. Athena is based on Linux system development, including high-precision maps, positioning, and navigation , Perception fusion, decision planning, vertical and horizontal control, simulation platform and mobile device interactive terminal and other modules, supporting complete bicycle automatic driving functions (lane keeping, station parking, following driving, lane change obstacle avoidance, emergency braking, etc.); At the same time, it also has a network-connected automatic driving function, which can provide modules such as cloud computing, roadside perception, and background management. It supports functions such as one-click car calling, one-key car return, and network-connected fleet. The Athena automatic driving software system has the characteristics of light weight and embeddability. It can run on the Titan hardware autonomous driving domain controller (power consumption does not exceed 60 watts), an embedded hardware platform independently developed by Universal Smart. Athena supports the evolution from L2 to L4, which is also the evolution from traditional ADAS functions to scenario-based autonomous driving.
1. Function Overview
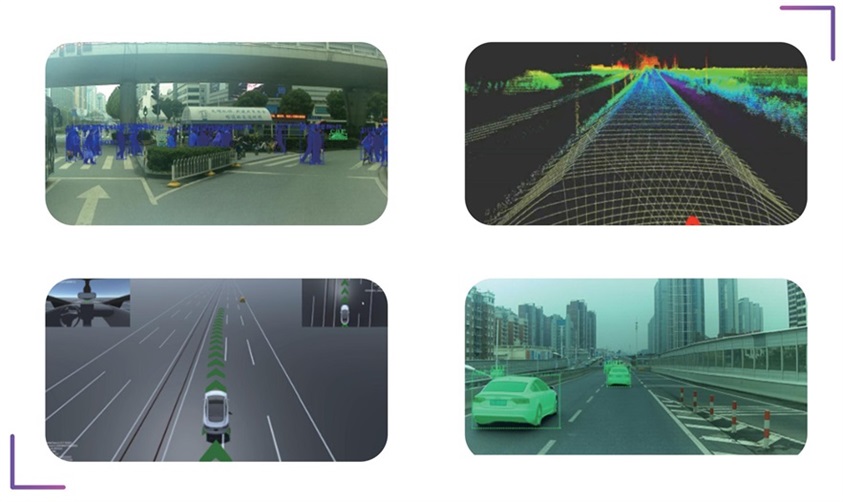
Athena is a real-time Linux-based L4 automatic driving software system, including deep learning fusion perception, fusion positioning, complex environment decision planning algorithm, and accurate and reliable control algorithm, etc. Titan automatic driving domain controller, power consumption does not exceed 60 watts, provides real-time three-dimensional fusion perception and positioning for autonomous driving, complex scenario decision planning, vehicle-road cooperative communication, and supports different forms of autonomous driving of bicycles, fleets and vehicle-road cooperation Features.
Main functions of the software package
Second, the software architecture
Athena software provides three main parts: algorithm, data set, and test simulation. The algorithm software package supports visual perception, fusion positioning, decision planning and control algorithm. The algorithm has been optimized and tested in detail and can be run on Titan3 in real time. In addition, the software package provides related data sets, sample maps and simulation tools. Huanyu can provide Titan controller and wire-controlled vehicle platform in addition to the software package to facilitate customers' testing and commercial deployment.
Software package architecture
Athena provides the basic implementation of each module of autonomous driving, and the message flow of each module is transmitted through the lightweight UDP protocol LCM. The blue modules are the functions already implemented by Huanyu Zhixing, and the orange parts are the resources that need to be relied on. The entire architecture also takes into account the requirements of intelligent network applications, high-precision maps, intersection management, and global path planning to deliver corresponding information through the network side, in order to deploy related applications in the cloud and road side in the future.
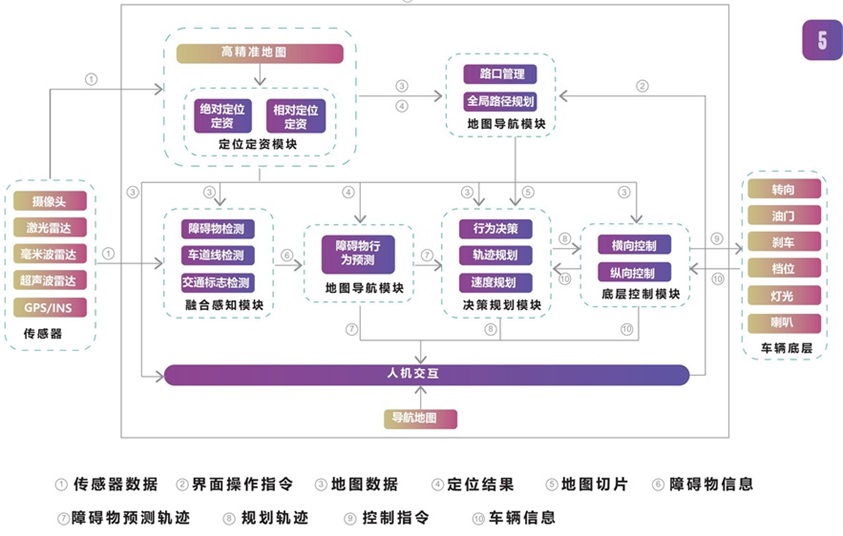
Software message flow
Three, function list
Table 1. System functions
System function definition |
System function list |
Remarks |
|
Beckoning parking |
Mobile phone |
|
|
Mobile phone parking |
|
|
|
Pedestrian avoidance |
|
|
|
one-button start |
|
|
|
Driving in an urban environment |
Import traffic |
|
|
Driving in congestion |
|
|
|
Traffic |
|
|
|
Red light stop |
|
|
|
Turn left automatically |
|
|
|
Pedestrian avoidance |
|
|
|
Automatic overtaking |
|
|
|
Driving at high speed |
Lane keeping |
|
|
Overtaking lane change |
|
|
|
Congestion assistance |
|
|
|
High speed import |
|
|
|
Ramp up and down |
|
|
|
Through toll gate |
|
|
|
Network connection function |
Vehicle-Road Collaboration |
|
|
Formation driving |
|
|
|
Roadside perception collaboration |
|
|
|
Remote driving |
|
Table 2. Module functions
|
Module function definition |
Module Function List (Athena) |
Remarks |
|
control |
Lateral control |
PID、LQR、MPC |
|
Longitudinal control |
PID/PID+ feedforward, MPC |
|
|
Multi-vehicle cooperative control |
3 to 5 car cooperative control |
|
|
CarSim Co-simulation |
|
|
|
TruckSim Co-simulation |
|
|
|
Prescan co-simulation |
|
|
|
prediction |
Judging the prediction method based on recognition |
|
|
Map-based behavior prediction |
|
|
|
Tracking-based behavior prediction |
|
|
|
planning |
Decision-making |
|
|
Behavior-level decision evaluation selection |
|
|
|
Trajectory generation |
3rd or 5th curvature curve |
|
|
Track stitching optimization |
Ensure second order continuity |
|
|
Trajectory selection |
Cost function can be customized |
|
|
Parallel and vertical parking planning |
|
|
|
Unity simulation |
|
|
|
Prescan simulation |
|
|
|
navigation |
Lane-level planning |
|
|
Road-level planning |
Shortest path |
|
|
map |
High-precision map |
OSM or Opendirve |
|
Point cloud map construction |
SLAM stitching |
|
|
data set |
Urban Environmental Data Set |
Pedestrians, traffic lights, vehicles |
|
High-speed environmental data set |
Vehicle, lane line, road surface |
|
|
Positioning |
RTK positioning |
Real-time and reliable |
|
Lidar assisted positioning |
ICP, NDT |
|
|
Auxiliary positioning of visual lane line |
Lane extraction matching positioning |
|
|
Vision |
Pavement range segmentation |
Deep learning pixel-level segmentation |
|
Pedestrian detection and tracking |
SSD/YOLO/Mask rcnn |
|
|
Vehicle detection and tracking |
SSD/YOLO/Mask rcnn |
|
|
Lane line detection and tracking |
Pattern recognition method |
|
|
Traffic light detection |
Deep learning |
|
|
Traffic sign detection |
Deep learning |
|
|
Algorithm TensorRT optimization |
Support Tx2 and Xavier chips |
|
|
Lidar |
2.5D target detection and tracking |
Project to ground grid |
|
3D point cloud deep learning method |
3D grid computing |
|
|
Road edge extraction |
Feature extraction edge fitting |
|
|
Millimeter wave radar |
Vision and millimeter wave fusion |
Result-level fusion |
|
Target detection and tracking |
Continental 408, Delphi |
Related Products




contact us
work phone: 027-87384449
Business Cooperation: Manager Liu 18871184550
website: http://www.in-driving.com
Copyright Information
Huanyu Zhixing

About the official WeChat public account
More exciting waiting for you!